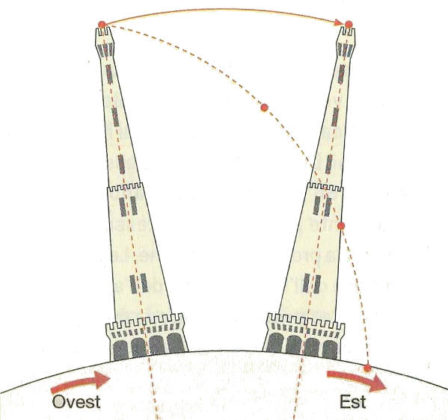
Viene qui illustrato il celebre esperimento di Guglielmini eseguito a Bologna nel 1790 mediante precise misurazioni dello scostamento dalla verticale di biglie di piombo lasciate cadere dalla Torre degli Asinelli.
Il risultato di questo esperimento permise di mettere in evidenza per la prima volta il moto di rotazione della Terra, prima cioè dell’esperimento del pendolo di Foucault nel 1851, infatti se la Terra fosse completamente immobile gli oggetti cadrebbero lungo una perfetta verticale.
In sintesi la base della torre e la sua estremità si muovono a velocità leggermente diverse: mentre la Terra ruota di un certo angolo, il vertice percorre un tratto maggiore rispetto a quello percorso dalla base quindi il vertice si muove più velocemente. Un oggetto che cade dalla torre avrà quindi una velocità orizzontale maggiore rispetto al suolo. Durante la caduta quindi percorre uno spazio maggiore rispetto al punto sulla sua verticale, cadendo quindi leggermente più ad est.
In dettaglio la Terra, in moto attorno al proprio asse, ruota ad una velocità v_0:
dove C_0 e R_T indicano rispettivamente la circonferenza e il raggio terrestre, mentre T è il periodo di rotazione terrestre. Un oggetto posto ad un’altezza h, compie una circonferenza C_h e pur avendo la stessa velocità angolare, sarà caratterizzato da una velocità v_h \gt v_0 :
\Delta v = v_h - v_0 = \frac{2 \pi h }{T} \cos \alpha
Calcolo il tempo di caduta imponendo nell’equazione y_f=y_0 - \frac{1}{2} g t^2
le condizioni y_0=h e y_f=0:
0 = h - \frac{1}{2} g t^2 \Rightarrow t=\sqrt[]{\frac{2h}{g}}
In questo intervallo di tempo la biglia avrà compiuto uno spostamento “orizzontale” maggiore del suolo terrestre:
\Delta s = \Delta v t = \frac{2 \pi h }{T} \cos \alpha \frac{2 \pi h }{T} \cos \alpha \sqrt[]{\frac{2h}{g}} = \left( \frac{2 \pi}{T} \frac{2}{g} \right) \sqrt[]{h^3} \cos \alpha
Dal momento che T=24 h = 86400 s e g=9,81 m/s^2 si può porre: k=\frac{2 \pi}{T} \frac{2}{g} \approx 3,28 \times 10^{-5}
Pertanto:
\Delta s = k \sqrt[]{h^3} \cos \alpha , da cui deduciamo che:
* all’equatore la deviazione è massima;
* ai poli non si ha deviazione;
* alle latitudini intermedie aumenta con la potenza di 3/2 rispetto all’altezza.
Intorno alla latitudine di 45° si ha (Bologna è a 44°30′): \cos \alpha = \frac{\sqrt[]{2}}{2}.
Quindi per un dislivello di h=100 m era atteso uno scostamento dalla verticale di circa: \Delta s = k \sqrt[]{100^3} \frac{\sqrt[]{2}}{2} \approx 0,023 m
Le misure effettuate si avvicinarono molto a questo valore, infatti all’epoca fu misurato uno scostamento di 1,7 cm.
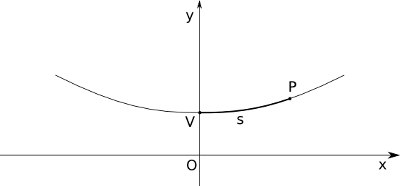
Un cavo vincolato ai suoi estremi a due punti fissi e soggetto alla sola forza peso assume una configurazione caratteristica simile ad una parabola; tale curva viene detta catenaria.Descrizione del problema della catenaria
La curva “assomiglia” ad una parabola in quanto ha nella sua estremità inferiore un vertice, è concava verso l’alto e simmetrica rispetto ad un asse passante per il vertice.
Consideriamo un sistema di riferimento in cui l’asse delle ordinate coincide con l’asse di simmetria, orientato nel verso della concavità.
A partire dal vertice muoviamoci lungo la curva percorrendo uno dei suoi rami, per esempio quello di ascissa positiva, per un tratto di lunghezza s fino al punto P.
Le coordinate del punto P dipendono dal tratto s percorso:
\begin{cases} x = x(s) \\ y = y(s) \end{cases}
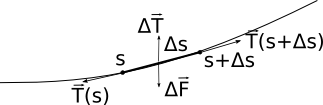
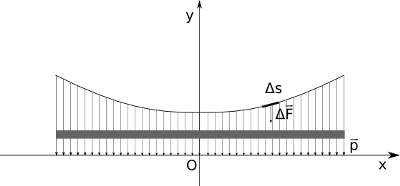
Affinché sussista l’equilibrio statico la risultante delle forze che agiscono su un qualunque tratto \Delta\,s del cavo è nulla. Su \Delta\,s agisce una forza peso che dipende dalla densità lineare \lambda del cavo, di modulo \Delta\,F = \lambda\;g\;\Delta\,s, diretta verso il basso.
Gli estremi di \Delta\,s sono invece soggetti alle tensioni \vec {T}(s) e \vec {T}(s + \Delta\,s) la cui risultante è \Delta\,\vec{T} = \vec{T} (s + \Delta\,s) - \vec{T}(s). Per la staticità della configurazione la risultante delle forze a cui è soggetto il segmento \Delta\,s è nulla, quindi \Delta\,\vec{T}= \lambda\;h\;\Delta\,s\;\hat j, dove \hat j è il versore dell’asse delle ordinate. Bilancio delle forze agenti su un tratto di corda
Passando alle componenti
Poiché queste uguaglianze valgono anche per un tratto di curva infinitesimo ds abbiamo
\begin{cases}d T_x = 0\\ d T_y = \lambda\;g\;d s\end{cases} \Rightarrow \\{ \begin{cases} & \int_{T_x (0)}^{T_x (s)} d \tau = c\\ & \int_{T_y (0)}^{T_y (s)} d \tau = \int_{0}^{s} g \lambda d \sigma\end{cases} \Rightarrow \\ \begin{cases} T_x (s) - T_x (0) = c\\ T_y (s) - T_y (0) = g\;\lambda\;s \end{cases} }
Quindi T_x (s) = T_x (0) + c e dal momento che T_x (0) = T_x (0) + c allora c = 0, cioè la componente orizzontale della tensione è costante su tutto il ramo della corda di ascissa positiva, ponendo perciò T_0 = T_x (0), avremo T_x (s) = T_0 lungo tutta la corda.
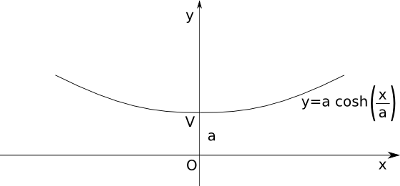
D’altra parte T_y, la componente verticale della tensione, è dovuta al peso del cavo di lunghezza s compreso tra il vertice e il punto P, quindi si ha T_y(0) = 0. Abbiamo infine
Quindi \frac{dy}{dx} = \frac{s}{a} \Rightarrow \frac{dy}{dx} = \sinh \left ( \frac{x}{a} \right ) \Rightarrow y = a\;\cosh \left ( \frac{x}{a} \right ) + c dove c si può scegliere liberamente traslando in maniera opportuna il sistema di coordinate. Imponendo y(0)=a si ha c=0 e pertanto y = a\;\cosh \left ( \frac{x}{a} \right ).
Diverso è il caso di un cavo soggetto al un carico uniforme p e per il quale il carico dovuto al proprio peso è trascurabile. Ciò si verifica nei classici ponti sospesi, in cui il cavo funge da struttura portante.Caso del ponte sospeso
La forza verticale che agisce su ogni tratto \Delta\,s è in questo caso \Delta\,\vec{F}= p\;\Delta\,x\;\hat jper cui possiamo riscrivere le equazioni della tensione in questo modo
\begin{cases} \Delta\,T_x = 0 \\ \Delta\,T_y = p\; \Delta\,x \end{cases} \Rightarrow \\ \begin{cases} d T_x = 0 \\ & d T_y = p\; d x \end{cases} \Rightarrow \\ \begin{cases} T_x = T_0 \\ T_y = p\; x \end{cases} \Rightarrow \\ \begin{cases} T \frac{dx}{ds} = T_0 \\ T \frac{dy}{ds} = p\; x \end{cases} \Rightarrow \frac{dy}{dx} = \frac{p}{T_0}\; x
da cui y = \frac{p}{2\;T_0}\;x^2 + c.
Scegliendo opportunamente il sistema di riferimento in modo che y(0)=0 si ha c=0 e quindi y = \frac{p}{2\;T_0}\;x^2 che si riconosce essere l’equazione della parabola.
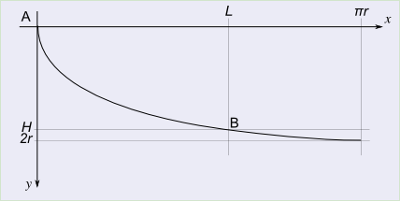
Il problema della brachistocrona consiste nel trovare la particolare traiettoria che un corpo, soggetto alla sola forza peso, deve compiere nel passare da un punto A ad un punto B posto ad una quota più bassa, che sia tale da minimizzare il tempo di percorrenza.
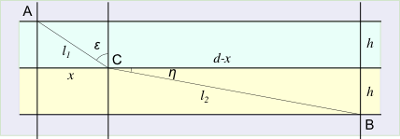
La ricerca di questa curva può avvenire notando l’analogia con quanto avviene per la rifrazione della luce. Nel passaggio da un mezzo all’altro la luce varia la sua velocità e il percorso che compie nell’unire due punti è quello che gli permette di impiegare meno tempo. I punti A e B si trovano agli estremi di due strati di materiali diversi e di uguale spessore h. La luce attraverserà la linea di separazione in un punto C da determinare. Nei due strati la luce ha velocità rispettivamente
v_1 e v_2 e percorre i tratti l_1=\sqrt{h^2 + x^2} e l_2=\sqrt{h^2 + (d-x)^2} con tempi di percorrenza t_1 = \frac{l_1}{v_1} = \frac{\sqrt{h^2 + x^2}}{v_1} e t_2=\frac{l_2}{v_2}=\frac{\sqrt{h^2 + (d-x)^2}}{v_2}.
Il tempo totale di percorrenza risulta quindi t = t_1 + t_2 = \frac{\sqrt{h^2 + x^2}}{v_1} + \frac{\sqrt{h^2 + (d-x)^2}}{v_2}.
Scegliamo la posizione del punto C in modo da minimizzare il tempo di percorrenza. Il punto di minimo dell’espressione del tempo deve avere necessariamente derivata nulla:
Dove con \varepsilon e \eta abbiamo indicato gli angoli di incidenza e di rifrazione dispetto alla normale alla superficie di separazione. Il punto C è determinato dalla soluzione della precedente equazione, inoltre si ha \frac{\sin \varepsilon }{v_1} = \frac{\sin \eta }{v_2} = \frac{1}{k}
con k una opportuna costante.
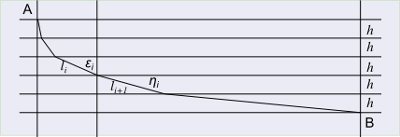
Si può generalizzare questo risultato applicando più volte ad una successione di strati contigui di uguale spessore e di materiali diversi. Nello strati i-esimo la luce percorre il tratto l_i
ad una velocità v_i e resta determinato il punto di passaggio x_i tra ciascuno strato. Il tempo totale impiegato per passare dal punto A al punto B è dato da:
Quando l’ampiezza degli strati tende a zero e il loro numero tende all’infinito, la successione di tratti rettilinei tende ad una curva. Poiché
\sin \varepsilon_i = v_i \frac{\sin \eta_i}{v_{i+1}} allora \sin \varepsilon_i sarà tanto piccolo quanto più v_i è piccolo e quindi se la velocità nel primo tratto tende a zero allora \varepsilon_i tende a zero, cioè la direzione iniziale tende alla verticale. Allo stesso modo, dal momento che \sin \eta_{i+1} = v_{i+1} \frac{\sin \varepsilon_i}{v_i} allora \sin \eta_{i+1} crescerà al crescere di v_{i+1} e poiché il massimo della funzione seno si ha per \frac{\pi}{2}, la velocità massima si raggiunge quando il moto è orizzontale.
Applichiamo questo risultato al caso di un corpo che transita dal punto A al punto B e cerchiamo la traiettoria che ottimizzi il tempo di percorrenza.
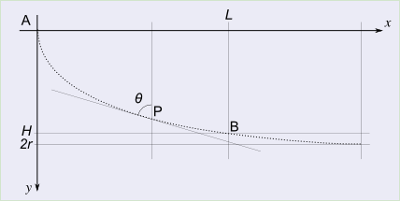
Consideriamo un sistema di riferimento con origine coincidente con il punto A e l’asse delle ordinate orientato verso il basso: A(0,0) e B(L,H).
L’energia totale di un corpo soggetto alla forza peso è E= \frac{1}{2} m v^2 + m g y.
Tale quantità è costante dal momento che non agiscono forze non conservative inoltre imponendo la condizione iniziale v_A=0
E_A=0 \Rightarrow \frac{1}{2} m v^2 + m g y = 0
e quindi v^2 = 2 g y.
Sia \theta l’angolo che la tangente alla traiettoria forma con la verticale, poiché
\frac{\sin \theta}{v} = \frac{1}{k} costante allora
Indichiamo invece con 2 r l’ordinata relativa alla massima velocità; avremo 2 r = \frac{k^2}{2 g} \sin \frac{\pi}{2} = \frac{k^2}{2 g}
e quindi k^2 = 4 g r.
Sostituiamo il valore di k^2 nell’espressione dell’ordinata: y=\frac{4 g r}{2 g} \sin^2 \theta = 2 r \sin^2 \theta.
Derivando quest’ultima espressione rispetto a \theta:
\frac{dy}{d\theta}=2 r \cdot 2 \sin \theta \cos \theta = 2 r \sin 2 \theta.
Poiché
\frac{dx}{dy}=\tan \theta \Rightarrow \frac{dx}{d\theta}=\frac{dx}{dy}\frac{dy}{d\theta} = \tan \theta \cdot 4 r \sin \theta \cos \theta = =\frac{\sin \theta}{\cos \theta} \cdot 4 r \sin \theta \cos \theta = 4 r \sin^2 \theta = 2 r (1-\cos 2 \theta)
Quindi
\begin{cases}\frac{dx}{d\theta} = 2 r ( 1-\cos 2\theta ) \\ \frac{dy}{d\theta} = 2 r \sin 2\theta\end{cases}\Rightarrow\begin{cases}x = r ( 2 \theta-\sin 2\theta ) + c_1 \\ y = -r \cos 2 \theta + c_2\end{cases}
dove c_1 e c_2 sono determinate a partire dalle condizioni iniziali. È stato supposto che il corpo sia inizialmente fermo in A e quindi il suo moto inizia nella direzione verticale: \theta_A = 0
La curva cercata si esprime in forma parametrica come
\begin{cases} x = r ( 2 \theta-\sin 2\theta ) \\ y = r ( 1-\cos 2 \theta ) \end{cases}
Si riconosce che tale curva rappresenta una cicloide ossia la curva descritta da un punto su una circonferenza di raggio r quando questi viene fatto rotolare.
Deriviamo queste ultime espressioni rispetto al tempo:
Il tempo totale T impiegato per raggiungere il punto più basso, cioè quando \theta = \frac{\pi}{2},
è dato dalla soluzione dall’equazione \frac{\pi}{2} = \frac{1}{2} \sqrt{\frac{g}{r}} T \Rightarrow T = \pi \sqrt{\frac{r}{g}}
Poiché l’espressione parametrica della curva si può scrivere come
\begin{cases} x = r ( \sqrt{\frac{g}{r}} t-\sin \sqrt{\frac{g}{r}} t ) \\ y = r ( 1-\cos \sqrt{\frac{g}{r}} t )\end{cases}
Al tempo T = \pi \sqrt{\frac{r}{g}} il corpo si troverà nel punto
\begin{cases} x = r ( \pi-\sin \pi ) \\ y = r ( 1-\cos \pi ) \end{cases} \Rightarrow \begin{cases} x = \pi r \\ y = 2 r \end{cases} .
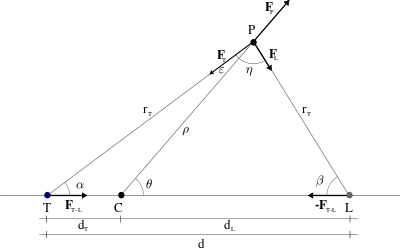
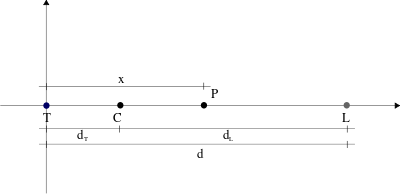
Dopo aver trovato i punti lagrangiani sulla congiungente Terra-Luna possiamo porci il problema più generale dell’esistenza di punti sul piano dell’orbita nei quali la risultante delle forze sia nulla.
Terra e Luna ruotano intorno ad un comune centro di massa C, che si trova lungo la loro congiungente, ad una distanza d_T dalla Terra e d_L dalla Luna:
Ricerca dei punti Lagrangiani L4 e L5
k=\frac{M_T}{M_L}
d_T=\frac{d}{1+k}
d_L=\frac{k}{1+k} d
Supponendo che il loro moto sia circolare uniforme, di periodo T, l’accelerazione centripeta della Terra e della Luna può essere espressa come:
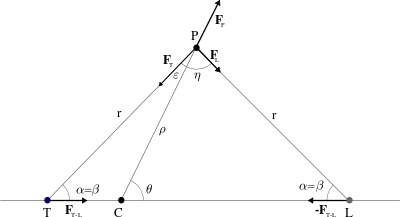
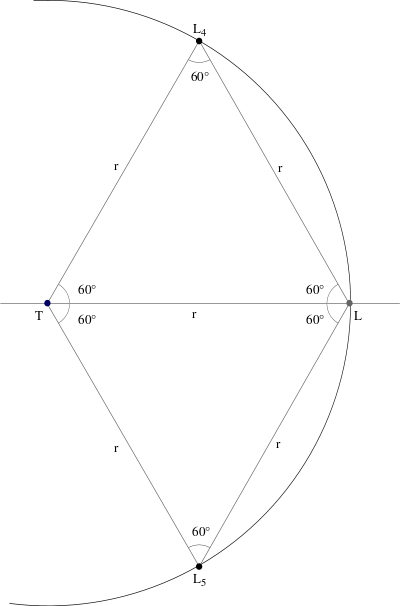
Ricerca dei punti Lagrangiani L4 e L5 al vertice di un triangolo equilatero
r = d, ovvero il punto P si trova al vertice di un triangolo equilatero e \alpha=60^\circ. Per simmetria di questi punti ne esistono due, e sono indicati con L_4 e L_5.
I Punti di Lagrange sono i punti appartenenti al piano dell’orbita (della Luna per esempio, in moto rispetto alla Terra), che si muovono in modo che la configurazione spaziale Terra-Luna-Punto non cambi.
Ricerca dei punti di Lagrange L1 L2 e L3
Nel sistema Terra-Luna i due corpi ruotano intorno ad un comune centro di massa C, con un moto che, per semplificare, supponiamo circolare uniforme. Le rispettive distanze della Terra e della Luna dal punto C sono:
d_T=\frac{1}{1+k}\ d
d_L=\frac{k}{1+k}\ d
Dove k è il rapporto M_T/M_L e d la distanza tra i due centri di massa.
L’accelerazione centripeta che agisce sulla Terra nel suo moto circolare uniforme rispetto al punto C è pari alla forza gravitazionale dovuta dall’azione della Luna:
Un corpo di massa m\ll\ M_T e M_L, posto sulla retta congiungente Terra-Luna, è soggetto alle attrazioni gravitazionali di entrambi i corpi; scelto il sistema di riferimento in modo che l’origine coincida con la Terra e l’asse x con la retta Terra-Luna si ha:
Forza di attrazione della Terra: F_T=G \frac{m\ M_T}{x^2}, sull’asse Terra-corpo e verso diretto in direzione della Terra, quindi con il segno positivo per x < 0 e negativo per x > 0.
Forza di attrazione della Luna: F_L=G \frac{m\ M_L}{(d-x)^2}, sull’asse corpo-Luna e verso diretto in direzione della Luna, quindi con il segno positivo per x < d e negativo per x > d.
Tale corpo inoltre ruota intorno al punto C con moto circolare uniforme, con la stessa velocità angolare \omega della Terra, in modo da rimanere sull’asse x, su di esso agisce una forza centripeta:
F_C=m a_c=m \frac{v^2}{r} = m \frac{4 \pi^2 r^2}{T^2} \frac{1}{r} = \\ = m \frac{4 \pi^2}{T^2}(x-d_T)= m \omega \left(x-\frac{d}{1+k} \right)=G m \frac{M_L}{d^3}(1+k)\left(x-\frac{d}{1+k}\right)= \\ = G m M_L \left(\frac{(1+k)x}{d^3} -\frac{1}{d^2}\right).
Sommando le forze che agiscono sulla massa m otteniamo che l’accelerazione che essa subisce è:
a = \begin{cases} G \frac{M_T}{x^2} + G \frac{M_L}{(d-x)^2} + G M_L \left(\frac{(1+k)x}{d^3} - \frac{1}{d^2}\right) & \text{se }\; x < 0 \\ -G \frac{M_T}{x^2} + G \frac{M_L}{(d-x)^2} + G M_L \left(\frac{(1+k)x}{d^3} - \frac{1}{d^2}\right) & \text{se }\; 0 < x < d \\ -G \frac{M_T}{x^2} - G \frac{M_L}{(d-x)^2} + G M_L \left(\frac{(1+k)x}{d^3} - \frac{1}{d^2}\right) & \text{se }\; x > d \end{cases}
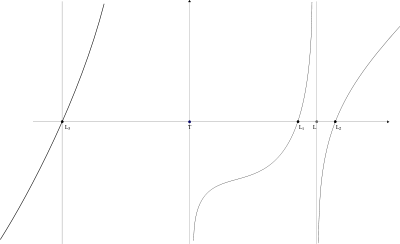
Cerchiamo i punti in cui tale accelerazione risulta nulla. Con una opportuna scelta delle unità di misura è possibile scrivere le seguenti equazioni:
Grafico della risultante delle forze\begin{cases} \frac{k}{x^2} + \frac{1}{(1-x)^2} + (1+k)x-1 = 0 & \text{se} \, x < 0 \\ - \frac{k}{x^2} + \frac{1}{(1-x)^2} + (1+k)x-1 = 0 & \text{se} \, 0 < x < d \\ - \frac{k}{x^2} - \frac{1}{(1-x)^2} + (1+k)x-1 = 0 & \text{se} \, x > d \end{cases}
Queste tre equazioni ammettono ciascuna una soluzione nel rispettivo insieme di definizione. Sono questi i punti di Lagrange L_1\, \left( x < 0 \right), L_2\, \left( 0 < x < d \right) e L_3\, \left( x > d \right).
Nel caso del sistema Terra-Luna si ha
M_T=5,98 \times 10^{24} kg
M_L=7,35 \times 10^{22} kg
quindi k=81,30. Si può applicare un qualunque metodo numerico per la ricerca degli zeri alle suddette equazioni nel rispettivo intervallo di definizione, ottenendo:
L_1=0,849 d = 3,23 \times 10^5 km quindi poco prima della Luna
L_2=1,168 d = 4,44 \times 10^5 km appena oltre la Luna
L_3=0,993 d = 3,77 \times 10^5 km sul semiasse negativo all’incirca nella parte diametralmente opposta alla Luna.
I Punti di Lagrange L_1 e L_2 si trovano quindi in prossimità della Luna, mentre L_3 si trova ad una distanza pari all’incirca alla distanza Terra-Luna sul lato opposto a quest’ultima.
Lanciamo un corpo di massa m dalla superficie della Terra ad una velocità v_0. La sua energia totale è data dalla somma dell’energia cinetica e dell’energia potenziale:
E_{tot} = \frac{1}{2} m v_0^2 -G \frac{m M_T}{R_T}
Quando il corpo si allontana dalla superficie della Terra la sua energia potenziale aumenta mentre l’energia cinetica diminuisce in modo che l’energia totale rimanga costante.
Sia r la distanza dal centro della Terra a cui si trova il corpo:
E_{tot} = \frac{1}{2} m v^2 -G \frac{m M_T}{r} = \frac{1}{2} m v_0^2 -G \frac{m M_T}{R_T} \Rightarrow\Rightarrow\;G \frac{M_T}{r} = \frac{1}{2} v^2 -\frac{1}{2} m v_0^2 + G \frac{M_T}{R_T} \Rightarrow\Rightarrow\;G \frac{M_T}{r} = \frac{1}{2} v^2 -\frac{1}{2} m v_0^2 + G \frac{M_T}{R_T}\Rightarrow\Rightarrow\;r = \frac{2 G M_T R_T}{2 G M_T -R_T \left(v_0^2 -v^2 \right)}
La velocità sarà nulla ad una distanza:
r_0 = \frac{2 G M_T R_T}{2 G M_T -R_T v_0^2 }
escludendo il caso in cui 2 G M_T -R_T v_0^2, cioè v_0=\sqrt{2 G \frac{M_T}{R_T}}.
Chiamiamo v_f=\sqrt{2 G \frac{M_T}{R_T}} “velocità di fuga”, un valore dipendente solo dalle caratteristiche del pianeta a cui si riferisce,
si ha quindi che per v_0< v_f il corpo lanciato si fermerà ad una distanza r_0
del centro della terra, mentre per v_0=v_f non interromperà mai il suo moto.
Come noto un oggetto posto ad una distanza d da un corpo di massa M per allontanarsene dovrà assumere una velocità almeno pari
alla velocità di fuga. Tale quantità vale:
v_f = \sqrt{2\; G\; \frac{M}{d}}
La luce si diffonde ad una velocità finita, pari a c = 3 \times 10^8\; m/s.
Ci chiediamo sotto quali condizioni la velocità di fuga possa essere pari o superiore a c. La soluzione si ottiene risolvendo la disequazione:
v_f \ge c \Leftrightarrow 2\; G\; \frac{M}{d} \ge c^2 \Leftrightarrow d \le 2\; G\; \frac{M}{c^2}
Posto d_0=2\; G\; \frac{M}{c^2}, la condizione sarà verificata per d \le d_0.
La superficie sferica di raggio d_0 è detta ”orizzonte degli eventi”, mentre lo spazio incluso nell’orizzonte degli eventi è detto ”buco nero”.
Lente gravitazionale prodotta dal buco neroI fotoni, le particelle che compongono la luce, benché privi di massa sono soggetti alla forza di gravità, pertanto la luce di una sorgente luminosa posta al di là dell’orizzonte degli eventi non può allontanarsi dalla massa centrale.
Quest’ultima quindi non potrà brillare di luce propria né di luce riflessa. La caratteristica di un tale oggetto è di ingoiare qualunque cosa, luce compresa, apparendo quindi completamente scuro, da cui il nome di buco nero.
Un buco nero non è pertanto visibile, ma si può individuare dalle reazioni che provoca su eventuali corpi celesti posti nelle sue prossimità e dalla sua capacità di deviare i raggi di luce.
All’interno del buco nero la materia ha una densità media
Se la quantità di materia è sufficiente anche una densità bassa può dare luogo ad un buco nero, per esempio è possibile che esista un buco nero con una densità pari a quella dell’aria \rho=1,225 \frac{kg}{m^3}.
Affinché ciò si verifichi il buco nero dovrebbe avere una massa M=\frac{(3 \times 10^8 \frac{m}{s})^3}{4}\sqrt{\frac{3}{ 2\;\pi\;(6,67 \times 10^{-11} \frac{N m^2}{kg^2})^3} \frac{1}{1,225 \frac{kg}{m^3}} } =7,74 \times10^{39} kg
cioè circa quattro miliardi di masse solari con un raggio sedicimila volte più grande.
Come caso limite possiamo prendere in considerazione una densità dell’ordine di quella che si può trovare nei nuclei atomici cioè \rho=2,3 \times 10^{17} \frac{kg}{m^3}. Abbiamo quindi un valore per la massa pari a
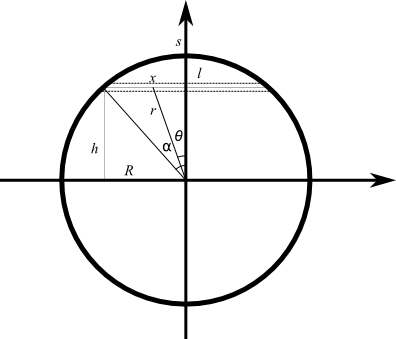
Tunnel sotterraneoSi immagini di creare una galleria lungo una linea che congiunga due qualunque punti della sfera terrestre. Un treno che scorre lungo i binari installati lungo questo tunnel, il cui moto non sia influenzato significativamente dall’attrito, può percorrere tutta la galleria sfruttando la sola azione della gravità. Ciò si deduce dal fatto che i punti della superficie terrestre sono equipotenziali e che la forza gravitazionale è conservativa.
Sia:
s = 2 \alpha R \Rightarrow \alpha = \frac{s}{2 R}
h = R \cos \alpha = R \cos \frac{s}{2 R}
l = 2 R \sin \alpha = 2 R \sin \frac{s}{2 R}
Un corpo che si trovi all’interno di una sfera cava è soggetta alla forza di gravità esercitata dalla massa del guscio della sfera. Si dimostra che tale azione ha risultante è nulla, per cui all’interno della Terra un oggetto è sottoposto alla gravità della massa sferica che si trova al di sotto. Supponendo la densità \rho della Terra uniforme tale massa sarà M(r)=\rho\,\frac{4}{3}\;\pi\,r^3 = \frac{M_T}{ \frac{4}{3}\,\pi\,R_T^2 } \frac{4}{3}\,\pi\,r^3 = M_T \frac{r^3}{R_T^3}.
Il modulo della forza esercitata dal corpo sarà quindi:
F = G \frac{M(r)\,m}{r^2}= G \frac{M_T\,m}{R_T^3} r
La componete verticale è annullata dalla reazione vincolare (il binario che sostiene il treno), mentre quella orizzontale sarà:
F_x=- G\,\frac{M_T\,m}{R_T^3} r \sin \theta =- G\,\frac{M_T\,m}{R_T^3} x.
L’equazione del moto si può scrivere quindi:
\ddot{x} + G\,\frac{M_T}{R_T^3}=0
che rappresenta un moto armonico di periodo T=2 \pi\,\sqrt{\frac{R_T^3}{G\,M_T}}.
L’equazione oraria del moto avrà la forma:
x = A \sin \left( \omega\,t + b \right)
Con A e b costanti dipendenti dalle condizioni iniziali, mentre \omega si ricava derivando più volte l’equazione del moto:
\dot{x}= \omega A \cos \left( \omega\,t + b \right)
\ddot{x}=- {\omega}^2 A \sin \left( \omega\,t + b \right)
\ddot{x}=- {\omega}^2 x \rightarrow {\omega}^2=G \frac{M_T}{R_T^3}
Tale valore dipende quindi solo dalla massa e dal cubo del raggio del pianeta o, in altri termini dalla sua densità e non dalla distanza tra i capi del tunnel.
In particolare, per la Terra, un qualunque tunnel siffatto sarà percorso in un tempo indipendente dalla distanza dei due punti e sarà:
Sia Marte che la Terra orbitano attorno al Sole seguendo le tre Leggi di Keplero. Si muovono quindi lungo orbite ellittiche (1a Legge di Keplero) il cui semiasse è rispettivamente a_M e a_T. Nel seguito approssimeremo tali orbite con circonferenze.
Per la 3a Legge di Keplero i periodi di rivoluzione saranno tali che: \frac{T_T^2}{a_T^3}=\frac{T_M^2}{a_M^3}=k
con k una costante valida per tutti i corpi orbitanti intorno al Sole.
Poiché T_T = 1\; anno = 365,35\; giorni e T_M=686,98\; giorni= 1,881\; anni abbiamo che:a_M^3=\left(\frac{T_M}{T_T}\right)^2 a_T^3 \rightarrow a_M=\sqrt[3]{\left(\frac{T_M}{T_T}\right)^2} a_T = \sqrt[3]{1,881^2}\; U.A.= 1,52\; U.A.
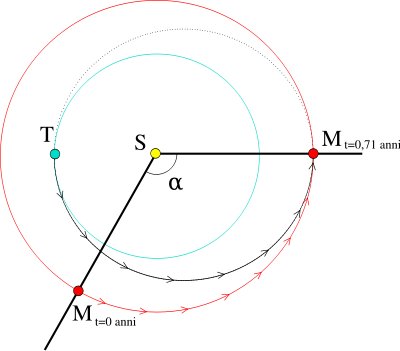
Una navicella lanciata dalla Terra verso Marte seguirà anch’essa un’orbita ellittica in cui il Sole occupa uno dei fuochi.
Scegliamo l’ellisse in modo che il perielio passi per l’orbita della Terra e l’afelio per l’orbita di Marte.
Orbita di andata dalla Terra a Marte
Il suo semiasse sarà quindi: a=\frac{a_T + a_M}{2}=\frac{1}{2} \left( 1 + \sqrt[3]{\left(\frac{T_M}{T_T}\right)^2} \right) a_T = 1,26\; U.A.
Anche per la navicella vale la 3a Legge di Keplero, il periodo T della sua orbita e il semiasse a saranno tali che: \frac{T_2}{a^3}=\frac{T_T^2}{a_T^3} \rightarrow T^2=\frac{a^3}{a_T^3} T_T^2 = \frac{1}{8} \left( 1 + \sqrt[3]{\left(\frac{T_M}{T_T}\right)^2} \right)^3 T_T^2\; \rightarrow \rightarrow T=\frac{\sqrt{2}}{4} \sqrt{\left( 1 + \sqrt[3]{\left(\frac{T_M}{T_T}\right)^2} \right)^3} T_T = 1,42\; anni.
Il viaggio di andata durerà quindi: \frac{T}{2}=\frac{\sqrt{2}}{8} \sqrt{\left( 1 + \sqrt[3]{\left(\frac{T_M}{T_T}\right)^2} \right)^3} T_T = 0,71\; anni = 258,88\; giorni.
Al momento del lancio la Terra si troverà nel perielio dell’orbita della navicella; il lancio dovrà essere effettuato nel momento giusto, di modo che quando la navicella raggiunge l’afelio vi trovi il pianeta Marte.
Avendo supposto il moto dei pianeti circolare, come conseguenza della 2a Legge di Keplero, esso sarà circolare uniforme, per cui Marte, nel periodo \frac{T}{2} percorrerà un angolo \alpha tale che: \frac{T_M}{2 \pi}=\frac{T/2}{\alpha} \rightarrow \alpha = \frac{T}{T_M} \pi = \frac{\sqrt{2}}{4} \sqrt{\left( 1 + \sqrt[3]{\left(\frac{T_M}{T_T}\right)^2} \right)^3} \frac{T_T}{T_M} \pi = 0,75\; \pi = 135^\circ 38^{\prime} 59^{\prime\prime}.
Il momento giusto per l’inizio del viaggio sarà quando tra i due pianeti c’è un angolo \pi -\alpha = 0,25\; \pi = 44^\circ 21^{\prime} 01^{\prime\prime}, misurato nel verso del moto della Terra.
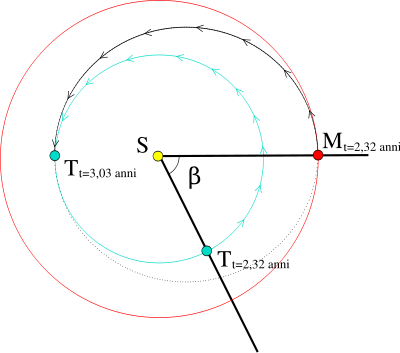
Il momento in cui far iniziare il viaggio di ritorno va valutato altrettanto correttamente, altrimenti la navicella rischia di non incontrare la Terra e sarà costretta a orbitare per sempre intorno al Sole.
Nell’intervallo di tempo T/2, il tempo necessario anche per il ritorno, il nostro pianeta percorre un angolo \beta tale che \frac{T_T}{2 \pi}=\frac{T/2}{\beta} \rightarrow \beta = \frac{T}{T_T} \pi = \frac{\sqrt{2}}{4} \sqrt{\left( 1 + \sqrt[3]{\left(\frac{T_M}{T_T}\right)^2} \right)^3} \pi = 1,42\; \pi = 255^\circ 09^\prime 26^{\prime\prime}
Il viaggio di ritorno dovrà cominciare quando tra la Terra e Marte vi è un angolo \beta -\pi = 0,42\; \pi = 75^\circ 09^\prime 26^{\prime\prime}
nel verso del moto della Terra.
Quindi una volta arrivata su Marte la navicella dovrà aspettare le condizioni favorevoli per il ritorno.
Orbita di ritorno da Marte alla Terra
La velocità angolare relativa della Terra rispetto a Marte è data da \omega = \frac{2 \pi}{T_T} -\frac{2 \pi}{T_M} = 2 \pi \left( \frac{1}{T_T} -\frac{1}{T_M} \right) = 0,94\; \frac{\pi}{anni}.
L’equazione del moto della Terra rispetto a Marte è \theta = \theta_0 + \omega t ponendo \theta_0 = \pi -\alpha, cioè la configurazione presente al momento della navicella dalla Terra e \theta=\beta + \pi, la configurazione che si deve verificare per il ritorno sulla Terra, si ha: \beta + \pi + 2 k \pi = \pi -\alpha + \omega t, k \in \mathbb{Z} \rightarrow t = \frac{\alpha + \beta +2 k \pi}{\omega} = \frac{\alpha + \beta +2 k \pi}{2 \pi} \, \frac{T_T T_M}{T_M -T_T}, k \in \mathbb{Z}
La quantità \frac{2 \pi}{\omega} = \frac{T_T T_M}{T_M -T_T}=2,14\; anni
rappresenta il tempo che deve trascorrere affinché una qualunque configurazione si ripeta.
ciò significa che una volta arrivati su Marte, dopo circa 259 giorni, il ritorno deve cominciare 2,32 anni dopo la partenza dalla Terra, e quindi si dovrà sostare sulla superficie di Marte 1,61 anni; circa 587 giorni, cioè più di un anno e mezzo, e se si mancasse il momento giusto si dovrebbe rimanere su Marte per altri 2,14 anni.
In totale il viaggio di andata e ritorno, comprensivo della sosta su Marte durerà 3,03 anni.
L’orbita della navicella è una ellisse il cui semiasse maggiore a = \frac{a_T + a_M}{2} = \frac{1}{2}\left( 1 + \sqrt[3]{\left(\frac{T_M}{T_T}\right)^2} \right) a_T = 1,26\; U.A.
, mentre il parametro c= \frac{a_M-a_T}{2}=\frac{1}{2} \left( \sqrt[3]{\left(\frac{T_M}{T_T}\right)^2 -1 } \right) a_T = 0,26\; U.A.
Per cui il semiasse minore sarà: b^2 = a^2-c^2 = \frac{1}{4} \left(a_T + a_M \right)^2 -\frac{1}{4}\left(a_T -a_M \right)^2 = \frac{1}{4} \left(a_T^2 + a_M^2 + 2 a_M a_T -a_M^2 -a_T^2 +2 a_M a_T \right) = a_M a_T , per cui b=\sqrt{a_M a_T} = \sqrt[3]{\frac{T_M}{T_T}} a_T = 1,23\; U.A..
L’area dell’ellisse è data da: A = a b \pi = \frac{a_T + a_M}{2} \sqrt{a_M a_T} \pi = \frac{1}{2}\left( 1 + \sqrt[3]{\left(\frac{T_M}{T_T}\right)^2} \right) \sqrt[3]{\frac{T_M}{T_T}} a_T^2 \pi=4,89\; U.A.^2
La velocità areale, per la 2a Legge di Keplero, è costante ed è pari a:
La navicella, lanciata dalla Terra può essere messa in un primo momento su un’orbita circolare intorno alla Terra, per poi essere accelerata fino alla velocità di fuga nel momento in cui la velocità orbitale della Terra intorno al Sole e quella della navicella sono paralleli e concordi, in modo che le due velocità si sommino. La navicella viene accelerata fino a raggiungere la velocità di fuga v_f; vogliamo che la velocità finale rispetto al Sole sia v_p, cioè la velocità al perielio: v_p=v_T+v_f \rightarrow v_f=v_p -v_T = 0,62\; \frac{U.A.}{anni}=2,945\; \frac{km}{s}
Posizionamento sull’orbita di lancio dalla Terra
Dal momento che v_f=\sqrt{2 G \frac{M_T}{r_f}} , dove r_f è il raggio dell’orbita su cui deve essere posizionata la navicella prima dell’accelerazione:
r_f=2 G \frac{M_T}{v_f^2}=91985,28\; km
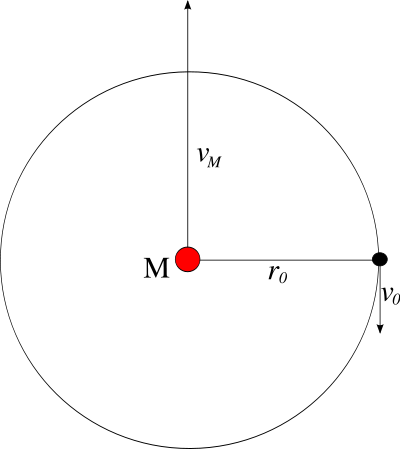
Accelerando la navicella fino alla velocità di fuga v_f, essa si sgancerà dall’orbita della Terra per entrare su un’orbita solare ellittica e, come abbiamo visto, raggiungerà Marte dopo 0,71 anni, quando si troverà all’afelio della sua orbita; sarà catturata dall’attrazione gravitazionale del pianeta. La velocità relativa della navicella rispetto a Marte sarà in quel puntov_0 = v_M-v_a=0,56\; \frac{U.A.}{anni} = 2,649\; \frac{km}{s}. Con questa velocità la navicella si può porre su un’orbita circolare con verso di rotazione contrario a quello di Marte rispetto al Sole, con un raggio r_0, e poiché \frac{v_0}{r_0}=G\; \frac{M_M}{v_a}
si ha: r_0=G\; \frac{M_M}{v_0^2}=6102,22\; km
Dalla navicella potrà essere fatta calare una sonda con eventuali esploratori umani che, come abbiamo già detto, dovranno rimanere 1,61 anni sul suolo marziano, cioè poco più di un anno e sette mesi, prima di trovare le condizioni favorevoli per il ritorno sulla Terra.
Passato questo periodo la sonda dovrà decollare per riunirsi alla navicella rimasta in orbita, dopodiché la navicella dovrà lasciare l’orbita di stazionamento r_0 per posizionarsi ad una distanza tale che la velocità di fuga sia: v_f=v_M -v_a = 0,56\; \frac{U.A.}{anni}=2,649\; \frac{km}{s}.
La navicella catturata dalla gravità di Marte
D’altra parte v_f=\sqrt{2 G \frac{M_M}{r_f}} \rightarrow r_f = 2G\; \frac{M_M}{v_f}=12204,45\; km
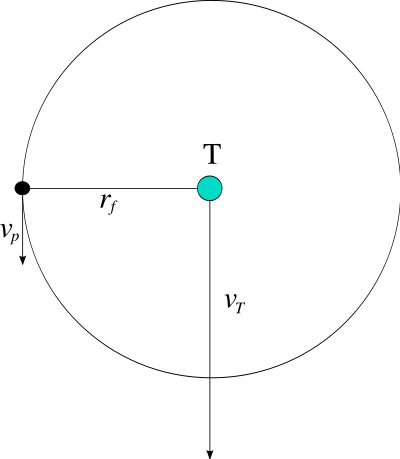
Accelerando fino a questa velocità la navicella si sgancerà dall’orbita di Marte per tornare su un’orbita solare ellittica, raggiungendo la Terra dopo 0,71 anni.
Quando, al perielio della sua orbita raggiungerà la Terra avrà una velocità v_p=6,9\; \frac{U.A.}{anni}=32,73\; \frac{km}{s}, mentre la Terra viaggia ad una velocità Terra v_T=29,79\; \frac{km}{s}.
La loro velocità relativa è quindi v_0=v_p -v_T = 0,62\; \frac{U.A.}{anni} = 2,945\; \frac{km}{s}, che permette alla navicella, catturata dalla gravità della Terra, di posizionarsi su un’orbita circolare di raggio r_0=G\; \frac{M_T}{v_0^2}=45992,64\; km, prima di scendere sulla Terra.
Un satellite compie un orbita circolare di raggio r intorno alla Terra. Il suo moto è un moto circolare uniforme di periodo T.
La velocità angolare del satellite è data da \omega = \frac{2 \pi}{T} e la sua velocità è v = \frac{2 \pi r}{T}, mentre l’accelerazione centrifuga a_c = \frac{v^2}{r} = \frac{4 \pi^2 r^2}{T r} = \frac{4 \pi^2}{T} r = \omega^2 r.
Il satellite è soggetto alla forza gravitazionale della Terra F = G \frac{m M_T}{r^2}, essendo m la massa del satellite e MT quella della Terra. Per cui l’accelerazione dovuta alla forza gravitazionale è a_g = G \frac{M_T}{r^2}.
Affinché l’orbita sia stabile deve essere:
a_c = a_g \Rightarrow \omega^2 r = G \frac{M_T}{r^2} \Rightarrow \omega^2 = G \frac{M_T}{r^3}
si ottiene quindi
T = 2 \pi \sqrt{\frac{r^3}{G M_T}}
e
v = \sqrt{\frac{G M_T}{r}}
Un satellite in orbita intorno alla Terra, posto nell’orbita più bassa possibile (ripercorrendo quindi l’esperimento ipotetico di Newton, di un proiettile lanciato tangenzialmente alla Terra),
ponendo cioè r = RT, si ha:
v = \sqrt{\frac{G M_T}{R_T}} = \sqrt{\frac{6,67 \times 10^-11 \; Nm^2/kg^2 \; 6 \times 10^24 \; kg}{6,37 \times 10^6 \; m}} = 7926 \; m/s = 28535 \; km/h
Un altro caso notevole è rappresentato dal moto di un satellite geostazionario, che mantiene cioè la stessa posizione relativa rispetto alla superficie della Terra,
quindi T = 24 h = 86400 s.
Il satellite avrà un’orbita di raggio
r = \sqrt[3]{G M_T \left(\frac{T}{2 \pi} \right)^2} = \sqrt[3]{6,67 \times 10^-11 \; Nm^2/kg^2 \; 6 \times 10^24 \; kg \left(\frac{86400 s}{2 \pi} \right)^2} = 4,24 \times 10^7 \; m = 42298 \; km
e percorrerla ad una velocità
v = \omega r = \frac{2 \pi}{T} r = \frac{2 \pi}{86400 \; s} \; 4,24 \times 10^7 \; m = 3076 \; m/s = 11073 \; km/h.