Dopo aver trovato i punti lagrangiani sulla congiungente Terra-Luna possiamo porci il problema più generale dell’esistenza di punti sul piano dell’orbita nei quali la risultante delle forze sia nulla.
Terra e Luna ruotano intorno ad un comune centro di massa C, che si trova lungo la loro congiungente, ad una distanza d_T dalla Terra e d_L dalla Luna:
Ricerca dei punti Lagrangiani L4 e L5
k=\frac{M_T}{M_L}
d_T=\frac{d}{1+k}
d_L=\frac{k}{1+k} d
Supponendo che il loro moto sia circolare uniforme, di periodo T, l’accelerazione centripeta della Terra e della Luna può essere espressa come:
Ricerca dei punti Lagrangiani L4 e L5 al vertice di un triangolo equilatero
r = d, ovvero il punto P si trova al vertice di un triangolo equilatero e \alpha=60^\circ. Per simmetria di questi punti ne esistono due, e sono indicati con L_4 e L_5.
I Punti di Lagrange sono i punti appartenenti al piano dell’orbita (della Luna per esempio, in moto rispetto alla Terra), che si muovono in modo che la configurazione spaziale Terra-Luna-Punto non cambi.
Ricerca dei punti di Lagrange L1 L2 e L3
Nel sistema Terra-Luna i due corpi ruotano intorno ad un comune centro di massa C, con un moto che, per semplificare, supponiamo circolare uniforme. Le rispettive distanze della Terra e della Luna dal punto C sono:
d_T=\frac{1}{1+k}\ d
d_L=\frac{k}{1+k}\ d
Dove k è il rapporto M_T/M_L e d la distanza tra i due centri di massa.
L’accelerazione centripeta che agisce sulla Terra nel suo moto circolare uniforme rispetto al punto C è pari alla forza gravitazionale dovuta dall’azione della Luna:
Un corpo di massa m\ll\ M_T e M_L, posto sulla retta congiungente Terra-Luna, è soggetto alle attrazioni gravitazionali di entrambi i corpi; scelto il sistema di riferimento in modo che l’origine coincida con la Terra e l’asse x con la retta Terra-Luna si ha:
Forza di attrazione della Terra: F_T=G \frac{m\ M_T}{x^2}, sull’asse Terra-corpo e verso diretto in direzione della Terra, quindi con il segno positivo per x < 0 e negativo per x > 0.
Forza di attrazione della Luna: F_L=G \frac{m\ M_L}{(d-x)^2}, sull’asse corpo-Luna e verso diretto in direzione della Luna, quindi con il segno positivo per x < d e negativo per x > d.
Tale corpo inoltre ruota intorno al punto C con moto circolare uniforme, con la stessa velocità angolare \omega della Terra, in modo da rimanere sull’asse x, su di esso agisce una forza centripeta:
F_C=m a_c=m \frac{v^2}{r} = m \frac{4 \pi^2 r^2}{T^2} \frac{1}{r} = \\ = m \frac{4 \pi^2}{T^2}(x-d_T)= m \omega \left(x-\frac{d}{1+k} \right)=G m \frac{M_L}{d^3}(1+k)\left(x-\frac{d}{1+k}\right)= \\ = G m M_L \left(\frac{(1+k)x}{d^3} -\frac{1}{d^2}\right).
Sommando le forze che agiscono sulla massa m otteniamo che l’accelerazione che essa subisce è:
a = \begin{cases} G \frac{M_T}{x^2} + G \frac{M_L}{(d-x)^2} + G M_L \left(\frac{(1+k)x}{d^3} - \frac{1}{d^2}\right) & \text{se }\; x < 0 \\ -G \frac{M_T}{x^2} + G \frac{M_L}{(d-x)^2} + G M_L \left(\frac{(1+k)x}{d^3} - \frac{1}{d^2}\right) & \text{se }\; 0 < x < d \\ -G \frac{M_T}{x^2} - G \frac{M_L}{(d-x)^2} + G M_L \left(\frac{(1+k)x}{d^3} - \frac{1}{d^2}\right) & \text{se }\; x > d \end{cases}
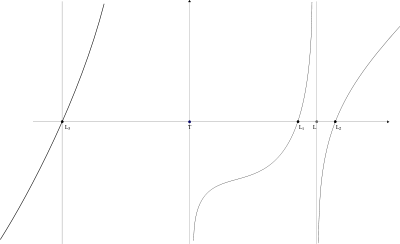
Cerchiamo i punti in cui tale accelerazione risulta nulla. Con una opportuna scelta delle unità di misura è possibile scrivere le seguenti equazioni:
Grafico della risultante delle forze\begin{cases} \frac{k}{x^2} + \frac{1}{(1-x)^2} + (1+k)x-1 = 0 & \text{se} \, x < 0 \\ - \frac{k}{x^2} + \frac{1}{(1-x)^2} + (1+k)x-1 = 0 & \text{se} \, 0 < x < d \\ - \frac{k}{x^2} - \frac{1}{(1-x)^2} + (1+k)x-1 = 0 & \text{se} \, x > d \end{cases}
Queste tre equazioni ammettono ciascuna una soluzione nel rispettivo insieme di definizione. Sono questi i punti di Lagrange L_1\, \left( x < 0 \right), L_2\, \left( 0 < x < d \right) e L_3\, \left( x > d \right).
Nel caso del sistema Terra-Luna si ha
M_T=5,98 \times 10^{24} kg
M_L=7,35 \times 10^{22} kg
quindi k=81,30. Si può applicare un qualunque metodo numerico per la ricerca degli zeri alle suddette equazioni nel rispettivo intervallo di definizione, ottenendo:
L_1=0,849 d = 3,23 \times 10^5 km quindi poco prima della Luna
L_2=1,168 d = 4,44 \times 10^5 km appena oltre la Luna
L_3=0,993 d = 3,77 \times 10^5 km sul semiasse negativo all’incirca nella parte diametralmente opposta alla Luna.
I Punti di Lagrange L_1 e L_2 si trovano quindi in prossimità della Luna, mentre L_3 si trova ad una distanza pari all’incirca alla distanza Terra-Luna sul lato opposto a quest’ultima.
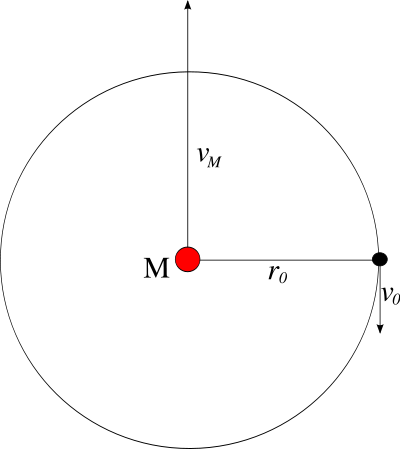
Lanciamo un corpo di massa m dalla superficie della Terra ad una velocità v_0. La sua energia totale è data dalla somma dell’energia cinetica e dell’energia potenziale:
E_{tot} = \frac{1}{2} m v_0^2 -G \frac{m M_T}{R_T}
Quando il corpo si allontana dalla superficie della Terra la sua energia potenziale aumenta mentre l’energia cinetica diminuisce in modo che l’energia totale rimanga costante.
Sia r la distanza dal centro della Terra a cui si trova il corpo:
E_{tot} = \frac{1}{2} m v^2 -G \frac{m M_T}{r} = \frac{1}{2} m v_0^2 -G \frac{m M_T}{R_T} \Rightarrow\Rightarrow\;G \frac{M_T}{r} = \frac{1}{2} v^2 -\frac{1}{2} m v_0^2 + G \frac{M_T}{R_T} \Rightarrow\Rightarrow\;G \frac{M_T}{r} = \frac{1}{2} v^2 -\frac{1}{2} m v_0^2 + G \frac{M_T}{R_T}\Rightarrow\Rightarrow\;r = \frac{2 G M_T R_T}{2 G M_T -R_T \left(v_0^2 -v^2 \right)}
La velocità sarà nulla ad una distanza:
r_0 = \frac{2 G M_T R_T}{2 G M_T -R_T v_0^2 }
escludendo il caso in cui 2 G M_T -R_T v_0^2, cioè v_0=\sqrt{2 G \frac{M_T}{R_T}}.
Chiamiamo v_f=\sqrt{2 G \frac{M_T}{R_T}} “velocità di fuga”, un valore dipendente solo dalle caratteristiche del pianeta a cui si riferisce,
si ha quindi che per v_0< v_f il corpo lanciato si fermerà ad una distanza r_0
del centro della terra, mentre per v_0=v_f non interromperà mai il suo moto.
Sia Marte che la Terra orbitano attorno al Sole seguendo le tre Leggi di Keplero. Si muovono quindi lungo orbite ellittiche (1a Legge di Keplero) il cui semiasse è rispettivamente a_M e a_T. Nel seguito approssimeremo tali orbite con circonferenze.
Per la 3a Legge di Keplero i periodi di rivoluzione saranno tali che: \frac{T_T^2}{a_T^3}=\frac{T_M^2}{a_M^3}=k
con k una costante valida per tutti i corpi orbitanti intorno al Sole.
Poiché T_T = 1\; anno = 365,35\; giorni e T_M=686,98\; giorni= 1,881\; anni abbiamo che:a_M^3=\left(\frac{T_M}{T_T}\right)^2 a_T^3 \rightarrow a_M=\sqrt[3]{\left(\frac{T_M}{T_T}\right)^2} a_T = \sqrt[3]{1,881^2}\; U.A.= 1,52\; U.A.
Una navicella lanciata dalla Terra verso Marte seguirà anch’essa un’orbita ellittica in cui il Sole occupa uno dei fuochi.
Scegliamo l’ellisse in modo che il perielio passi per l’orbita della Terra e l’afelio per l’orbita di Marte.
Orbita di andata dalla Terra a Marte
Il suo semiasse sarà quindi: a=\frac{a_T + a_M}{2}=\frac{1}{2} \left( 1 + \sqrt[3]{\left(\frac{T_M}{T_T}\right)^2} \right) a_T = 1,26\; U.A.
Anche per la navicella vale la 3a Legge di Keplero, il periodo T della sua orbita e il semiasse a saranno tali che: \frac{T_2}{a^3}=\frac{T_T^2}{a_T^3} \rightarrow T^2=\frac{a^3}{a_T^3} T_T^2 = \frac{1}{8} \left( 1 + \sqrt[3]{\left(\frac{T_M}{T_T}\right)^2} \right)^3 T_T^2\; \rightarrow \rightarrow T=\frac{\sqrt{2}}{4} \sqrt{\left( 1 + \sqrt[3]{\left(\frac{T_M}{T_T}\right)^2} \right)^3} T_T = 1,42\; anni.
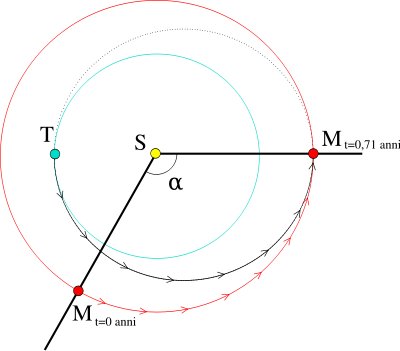
Il viaggio di andata durerà quindi: \frac{T}{2}=\frac{\sqrt{2}}{8} \sqrt{\left( 1 + \sqrt[3]{\left(\frac{T_M}{T_T}\right)^2} \right)^3} T_T = 0,71\; anni = 258,88\; giorni.
Al momento del lancio la Terra si troverà nel perielio dell’orbita della navicella; il lancio dovrà essere effettuato nel momento giusto, di modo che quando la navicella raggiunge l’afelio vi trovi il pianeta Marte.
Avendo supposto il moto dei pianeti circolare, come conseguenza della 2a Legge di Keplero, esso sarà circolare uniforme, per cui Marte, nel periodo \frac{T}{2} percorrerà un angolo \alpha tale che: \frac{T_M}{2 \pi}=\frac{T/2}{\alpha} \rightarrow \alpha = \frac{T}{T_M} \pi = \frac{\sqrt{2}}{4} \sqrt{\left( 1 + \sqrt[3]{\left(\frac{T_M}{T_T}\right)^2} \right)^3} \frac{T_T}{T_M} \pi = 0,75\; \pi = 135^\circ 38^{\prime} 59^{\prime\prime}.
Il momento giusto per l’inizio del viaggio sarà quando tra i due pianeti c’è un angolo \pi -\alpha = 0,25\; \pi = 44^\circ 21^{\prime} 01^{\prime\prime}, misurato nel verso del moto della Terra.
Il momento in cui far iniziare il viaggio di ritorno va valutato altrettanto correttamente, altrimenti la navicella rischia di non incontrare la Terra e sarà costretta a orbitare per sempre intorno al Sole.
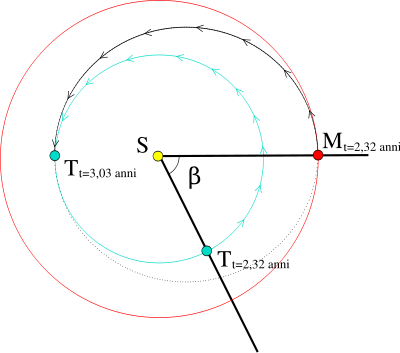
Nell’intervallo di tempo T/2, il tempo necessario anche per il ritorno, il nostro pianeta percorre un angolo \beta tale che \frac{T_T}{2 \pi}=\frac{T/2}{\beta} \rightarrow \beta = \frac{T}{T_T} \pi = \frac{\sqrt{2}}{4} \sqrt{\left( 1 + \sqrt[3]{\left(\frac{T_M}{T_T}\right)^2} \right)^3} \pi = 1,42\; \pi = 255^\circ 09^\prime 26^{\prime\prime}
Il viaggio di ritorno dovrà cominciare quando tra la Terra e Marte vi è un angolo \beta -\pi = 0,42\; \pi = 75^\circ 09^\prime 26^{\prime\prime}
nel verso del moto della Terra.
Quindi una volta arrivata su Marte la navicella dovrà aspettare le condizioni favorevoli per il ritorno.
Orbita di ritorno da Marte alla Terra
La velocità angolare relativa della Terra rispetto a Marte è data da \omega = \frac{2 \pi}{T_T} -\frac{2 \pi}{T_M} = 2 \pi \left( \frac{1}{T_T} -\frac{1}{T_M} \right) = 0,94\; \frac{\pi}{anni}.
L’equazione del moto della Terra rispetto a Marte è \theta = \theta_0 + \omega t ponendo \theta_0 = \pi -\alpha, cioè la configurazione presente al momento della navicella dalla Terra e \theta=\beta + \pi, la configurazione che si deve verificare per il ritorno sulla Terra, si ha: \beta + \pi + 2 k \pi = \pi -\alpha + \omega t, k \in \mathbb{Z} \rightarrow t = \frac{\alpha + \beta +2 k \pi}{\omega} = \frac{\alpha + \beta +2 k \pi}{2 \pi} \, \frac{T_T T_M}{T_M -T_T}, k \in \mathbb{Z}
La quantità \frac{2 \pi}{\omega} = \frac{T_T T_M}{T_M -T_T}=2,14\; anni
rappresenta il tempo che deve trascorrere affinché una qualunque configurazione si ripeta.
ciò significa che una volta arrivati su Marte, dopo circa 259 giorni, il ritorno deve cominciare 2,32 anni dopo la partenza dalla Terra, e quindi si dovrà sostare sulla superficie di Marte 1,61 anni; circa 587 giorni, cioè più di un anno e mezzo, e se si mancasse il momento giusto si dovrebbe rimanere su Marte per altri 2,14 anni.
In totale il viaggio di andata e ritorno, comprensivo della sosta su Marte durerà 3,03 anni.
L’orbita della navicella è una ellisse il cui semiasse maggiore a = \frac{a_T + a_M}{2} = \frac{1}{2}\left( 1 + \sqrt[3]{\left(\frac{T_M}{T_T}\right)^2} \right) a_T = 1,26\; U.A.
, mentre il parametro c= \frac{a_M-a_T}{2}=\frac{1}{2} \left( \sqrt[3]{\left(\frac{T_M}{T_T}\right)^2 -1 } \right) a_T = 0,26\; U.A.
Per cui il semiasse minore sarà: b^2 = a^2-c^2 = \frac{1}{4} \left(a_T + a_M \right)^2 -\frac{1}{4}\left(a_T -a_M \right)^2 = \frac{1}{4} \left(a_T^2 + a_M^2 + 2 a_M a_T -a_M^2 -a_T^2 +2 a_M a_T \right) = a_M a_T , per cui b=\sqrt{a_M a_T} = \sqrt[3]{\frac{T_M}{T_T}} a_T = 1,23\; U.A..
L’area dell’ellisse è data da: A = a b \pi = \frac{a_T + a_M}{2} \sqrt{a_M a_T} \pi = \frac{1}{2}\left( 1 + \sqrt[3]{\left(\frac{T_M}{T_T}\right)^2} \right) \sqrt[3]{\frac{T_M}{T_T}} a_T^2 \pi=4,89\; U.A.^2
La velocità areale, per la 2a Legge di Keplero, è costante ed è pari a:
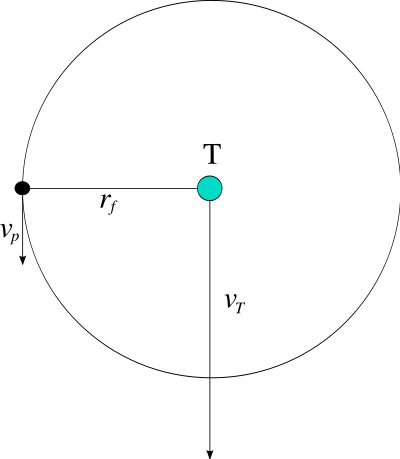
La navicella, lanciata dalla Terra può essere messa in un primo momento su un’orbita circolare intorno alla Terra, per poi essere accelerata fino alla velocità di fuga nel momento in cui la velocità orbitale della Terra intorno al Sole e quella della navicella sono paralleli e concordi, in modo che le due velocità si sommino. La navicella viene accelerata fino a raggiungere la velocità di fuga v_f; vogliamo che la velocità finale rispetto al Sole sia v_p, cioè la velocità al perielio: v_p=v_T+v_f \rightarrow v_f=v_p -v_T = 0,62\; \frac{U.A.}{anni}=2,945\; \frac{km}{s}
Posizionamento sull’orbita di lancio dalla Terra
Dal momento che v_f=\sqrt{2 G \frac{M_T}{r_f}} , dove r_f è il raggio dell’orbita su cui deve essere posizionata la navicella prima dell’accelerazione:
r_f=2 G \frac{M_T}{v_f^2}=91985,28\; km
Accelerando la navicella fino alla velocità di fuga v_f, essa si sgancerà dall’orbita della Terra per entrare su un’orbita solare ellittica e, come abbiamo visto, raggiungerà Marte dopo 0,71 anni, quando si troverà all’afelio della sua orbita; sarà catturata dall’attrazione gravitazionale del pianeta. La velocità relativa della navicella rispetto a Marte sarà in quel puntov_0 = v_M-v_a=0,56\; \frac{U.A.}{anni} = 2,649\; \frac{km}{s}. Con questa velocità la navicella si può porre su un’orbita circolare con verso di rotazione contrario a quello di Marte rispetto al Sole, con un raggio r_0, e poiché \frac{v_0}{r_0}=G\; \frac{M_M}{v_a}
si ha: r_0=G\; \frac{M_M}{v_0^2}=6102,22\; km
Dalla navicella potrà essere fatta calare una sonda con eventuali esploratori umani che, come abbiamo già detto, dovranno rimanere 1,61 anni sul suolo marziano, cioè poco più di un anno e sette mesi, prima di trovare le condizioni favorevoli per il ritorno sulla Terra.
Passato questo periodo la sonda dovrà decollare per riunirsi alla navicella rimasta in orbita, dopodiché la navicella dovrà lasciare l’orbita di stazionamento r_0 per posizionarsi ad una distanza tale che la velocità di fuga sia: v_f=v_M -v_a = 0,56\; \frac{U.A.}{anni}=2,649\; \frac{km}{s}.
La navicella catturata dalla gravità di Marte
D’altra parte v_f=\sqrt{2 G \frac{M_M}{r_f}} \rightarrow r_f = 2G\; \frac{M_M}{v_f}=12204,45\; km
Accelerando fino a questa velocità la navicella si sgancerà dall’orbita di Marte per tornare su un’orbita solare ellittica, raggiungendo la Terra dopo 0,71 anni.
Quando, al perielio della sua orbita raggiungerà la Terra avrà una velocità v_p=6,9\; \frac{U.A.}{anni}=32,73\; \frac{km}{s}, mentre la Terra viaggia ad una velocità Terra v_T=29,79\; \frac{km}{s}.
La loro velocità relativa è quindi v_0=v_p -v_T = 0,62\; \frac{U.A.}{anni} = 2,945\; \frac{km}{s}, che permette alla navicella, catturata dalla gravità della Terra, di posizionarsi su un’orbita circolare di raggio r_0=G\; \frac{M_T}{v_0^2}=45992,64\; km, prima di scendere sulla Terra.
Un satellite compie un orbita circolare di raggio r intorno alla Terra. Il suo moto è un moto circolare uniforme di periodo T.
La velocità angolare del satellite è data da \omega = \frac{2 \pi}{T} e la sua velocità è v = \frac{2 \pi r}{T}, mentre l’accelerazione centrifuga a_c = \frac{v^2}{r} = \frac{4 \pi^2 r^2}{T r} = \frac{4 \pi^2}{T} r = \omega^2 r.
Il satellite è soggetto alla forza gravitazionale della Terra F = G \frac{m M_T}{r^2}, essendo m la massa del satellite e MT quella della Terra. Per cui l’accelerazione dovuta alla forza gravitazionale è a_g = G \frac{M_T}{r^2}.
Affinché l’orbita sia stabile deve essere:
a_c = a_g \Rightarrow \omega^2 r = G \frac{M_T}{r^2} \Rightarrow \omega^2 = G \frac{M_T}{r^3}
si ottiene quindi
T = 2 \pi \sqrt{\frac{r^3}{G M_T}}
e
v = \sqrt{\frac{G M_T}{r}}
Un satellite in orbita intorno alla Terra, posto nell’orbita più bassa possibile (ripercorrendo quindi l’esperimento ipotetico di Newton, di un proiettile lanciato tangenzialmente alla Terra),
ponendo cioè r = RT, si ha:
v = \sqrt{\frac{G M_T}{R_T}} = \sqrt{\frac{6,67 \times 10^-11 \; Nm^2/kg^2 \; 6 \times 10^24 \; kg}{6,37 \times 10^6 \; m}} = 7926 \; m/s = 28535 \; km/h
Un altro caso notevole è rappresentato dal moto di un satellite geostazionario, che mantiene cioè la stessa posizione relativa rispetto alla superficie della Terra,
quindi T = 24 h = 86400 s.
Il satellite avrà un’orbita di raggio
r = \sqrt[3]{G M_T \left(\frac{T}{2 \pi} \right)^2} = \sqrt[3]{6,67 \times 10^-11 \; Nm^2/kg^2 \; 6 \times 10^24 \; kg \left(\frac{86400 s}{2 \pi} \right)^2} = 4,24 \times 10^7 \; m = 42298 \; km
e percorrerla ad una velocità
v = \omega r = \frac{2 \pi}{T} r = \frac{2 \pi}{86400 \; s} \; 4,24 \times 10^7 \; m = 3076 \; m/s = 11073 \; km/h.